丂偲偄偆傢偗偱丄慜夞僀儞僗僩乕儖偟偨mikroElektronika幮偺mikroC傪巊偭偰丄PIC偱摦偔僾儘僌儔儉傪嶌偭偰傒傑偟傚偆丅

丂僗僞乕僩儊僯儏乕偵搊榐偝傟偨mikroC傪幚峴偟偰傒傑偡丅偡傞偲丄(偙偺僶乕僕儑儞偱偼)偄偒側傝側偵傗傜僾儘僌儔儉偑尰傟傑偟偨丅壗偺偙偲傗傜傢偐傝傑偣傫偱偟偨偑丄偁偲偐傜偙傟偼僒儞僾儖偺傂偲偮偩偲傢偐傝傑偟偨丅偙偺傑傑偱偼PIC16F628A偱偼巊偊傑偣傫偺偱挱傔傞偩偗偵偟偰丄怴偟偄僾儘僕僃僋僩傪嶌傞偙偲偵偟傑偡丅
丂偱傕丄偣偭偐偔側偺偱挱傔偰傒傑偟傚偆丅
void main() { PORTC = 0; TRISC = 0; while(1) { PORTC = ~PORTC; Delay_ms(1000); } }
丂main()娭悢偑僾儘僌儔儉杮懱偭偰偄偆偺偼偳偙偺C尵岅傕曄傢傝傑偣傫偹丅偦偺拞偱丄PORTC偲TRISC偲偄偆僔儞儃儖偵0傪戙擖偟偰偄傑偡丅偙傟偼梊傔梡堄偝傟偨儗僕僗僞僔儞儃儖偱丄PORTC儗僕僗僞偵0傪丄TRISC儗僕僗僞偵0傪僙僢僩偟偰偄傑偡丅PORTC偼斈梡億乕僩C偺擖弌椡儗僕僗僞偱偡丅TRISC偼丄斈梡億乕僩C偺擖弌椡曽朄惂屼儗僕僗僞偱偡丅
丂柍尷儖乕僾偺 while暥偺拞偱丄PORTC偺抣傪斀揮偟丄Delay_ms(1000)偱1000msec偺僂僃僀僩傪偄傟偰偄傑偡丅1昩偛偲偵PORTC偺抣傪斀揮偟偰偄傞傢偗偱偡偹丅偙偙偵LED側偳傪偮側偄偱偄傟偽丄1昩偛偲偵揰摂丒徚摂傪孞傝曉偡傛偆側傕偺偱偡丅
丂偟偐偟偙傟偼PIC16F877A梡偵嶌傜傟偨僾儘僕僃僋僩丅僂僀儞僪僂嵍懁偺乽ProjectSetup乿偱PIC16F877A偑慖戰偝傟偰偄傑偡偹丅偦傕偦傕PIC16F628A偵偼PORTC側傫偰偁傝傑偣傫偐傜偹丅偟偐偟偣偭偐偔偱偡偐傜丄偙傟傪傕偲偵PIC16F628A梡偺僾儘僌儔儉傪嶌偭偰傒傑偟傚偆丅
丂偣偭偐偔側偺偱丄堦偐傜怴偟偄僾儘僕僃僋僩傪嶌傝傑偡丅僾儘僕僃僋僩偲偄偆偺偼丄傂偲偮偺傾僾儕働乕僔儑儞傪嶌傞偨傔偺偨偔偝傫偺僼傽僀儖偺僇僞儅儕偱偡偹丅僾儘僕僃僋僩偵僾儘僌儔儉偺僜乕僗僼傽僀儖傗僿僢僟僼傽僀儖傪搊榐偟偰偍偔偲丄傑偲傔偰僐儞僷僀儖偟偰偔傟傞偭偰傢偗偱偡丅傑偨丄PIC偺僐儞僼傿僊儏儗乕僔儑儞側偳傕偙偙偵搊榐偝傟傞偙偲偵側傝傑偡偺偱丄嶌傞夞楬偛偲偵堘偆僾儘僕僃僋僩傪嶌傝傑偡丅
丂儊僯儏乕偺傪幚峴偟傑偡丅
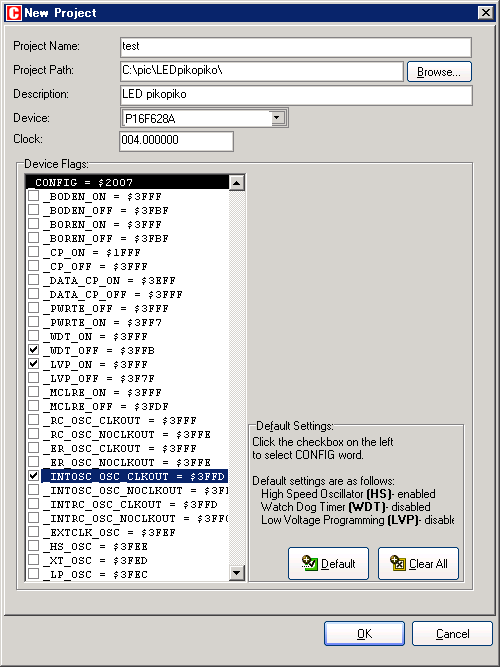
丂偡傞偲丄偙傫側僟僀傾儘僌偑搊応偟傑偡丅偙偙偱丄昁梫側愝掕傪偟偰偄偒傑偡丅
丂僾儘僕僃僋僩柤傪寛傔傑偡丅崱夞偼偲傝偁偊偢偺僥僗僩側偺偱test偲偟偰傒傑偟偨丅
丂僾儘僕僃僋僩偺曐懚愭傪寛傔傑偡丅僱僢僩儚乕僋僼僅儖僟偩偲偆傑偔偄偐側偄傒偨偄偱偡偺偱丄儘乕僇儖偵偟傑偡丅僟僀傾儘僌傪奐偄偰偡偖偼慜偺僾儘僕僃僋僩偺僷僗偑巆偭偰偄傑偡偺偱丄昁偢曄峏偡傞傛偆偵拲堄偟傑偟傚偆丅暘偗偨偐偭偨偺偵摨偠偲偙傠偵曐懚偟偰偟傑偭偨偲偐偄偆幐攕傪傛偔傗偭偪傖偄傑偡丅
丂偁偲偐傜壗偺僾儘僕僃僋僩偩偭偨偐傢偐傞掱搙偵愢柧彂偒傪偟偰偍偒傑偟傚偆丅
丂懳徾偺PIC儅僀僐儞傪慖傃傑偡丅崱夞偼PIC16F628A偱偡偺偱丄偦傟傪慖傫偱偍偒傑偟偨丅
丂巊梡偡傞僋儘僢僋廃攇悢傪愝掕偟傑偡丅偙偙偱愝掕偡傞偲偦偺僋儘僢僋偱摦嶌偡傞偲偄偆傢偗偱偼偁傝傑偣傫丅巊梡偡傞僋儘僢僋傪偙偙偱巜掕偟偰偍偔偲丄帪娫傗僞僀儈儞僌偺寁嶼傪偙偺僋儘僢僋傪尦偵僐儞僷僀儔偑彑庤偵傗偭偰偔傟傞偲偄偆傢偗偱偡丅偝偭偒偪傚偭偲偱偰偒偨Delay_ms(1000)傕丄偒偭偲偙偙偱巜掕偟偨僋儘僢僋廃攇悢傪傕偲偵寁嶼偟偰偔傟傞偺偩偲巚偄傑偡丅崱夞偼丄撪憼僋儘僢僋4MHz傪巊偆偙偲偵偟傑偡偺偱丄4傪婰擖偟傑偡丅扨埵偼MH倸偱偡丅
丂CONFIG儗僕僗僞偺撪梕傪巜掕偟傑偡丅WDT_OFF丄撪憼僋儘僢僋傪巊偆偺偱INTOSC_OSC_CLKOUT傑偨偼INTOSC_OSC_NOCLKOUT偵僠僃僢僋傪擖傟傑偡丅INTOSC_OSC_CLKOUT偵偟偰偍偔偲丄撪憼僋儘僢僋偺弌椡偑僺儞偱摼傜傟傑偡偺偱丄僠僢僾偑摦偄偰偄傞偐偳偆偐傢偐傞偭偰偄偆偩偗偺偙偲偱偡丅崱偺偲偙傠棙梡偡傞梊掕偼偁傝傑偣傫丅偦偺懠丄弶婜忬懺偱ON偱偡偑柧帵揑偵LVP_ON乮巹偺崱偺娐嫬偱偼掅揹埑彂偒崬傒傪偡傞偺偱乯偵僠僃僢僋傪擖傟傑偟偨丅僨乕僞僔乕僩傪尒側偑傜昁梫側崁栚偵僠僃僢僋傪偟偰偄偒傑偡丅
丂埲忋偱僾儘僕僃僋僩偺愝掕偼OK偱偟傚偆丅傑偨屻偐傜廋惓偟偨偔側偭偨傜丄偺偱嵞傃愝掕偡傞偙偲偑偱偒傑偡丅
丂僾儘僕僃僋僩偺愝掕偑廔傢偭偨傜丄憗懍僾儘僌儔儉傪嶌偭偰傒傑偟傚偆丅愭傎偳彑庤偵昞帵偝傟偨僒儞僾儖僾儘僕僃僋僩傪尦偵丄PIC16F628A梡偺僾儘僌儔儉傪嶌偭偰傒傑偡丅傕偪傠傫丄夞楬傕峫偊側偄偲偄偗傑偣傫丅傑偢偼僜乕僗僼傽僀儖偐傜丅
void main() { PORTB = 0; TRISB = 0; while(1) { PORTB = ~PORTB; Delay_ms(1000); } }
丂愭傎偳偺僒儞僾儖僜乕僗偺億乕僩C傪億乕僩B偵偟偨偩偗偱偡偑丄偙傫側姶偠偱偡丅杮摉偼僐儞僷儗乕僞偺愝掕偲偐偦偺曈傕傗偭偰偍偐側偄偲偄偗側偄傒偨偄偱偡偑丄偲傝偁偊偢摦偗偽OK偲偄偆偙偲偵偟偰偍偒傑偟傚偆丅
丂mikroC偱偼丄梊傔慻傒崬傑傟偨娭悢側偳傪巊偆偲偒偵偼摿偵include僼傽僀儖傪巜掕偡傞昁梫偼側偄傛偆偱偡偹丅
丂僜乕僗傪彂偒崬傫偩傜丄憗懍價儖僪偟偰傒傑偡丅價儖僪偲偼丄僐儞僷僀儖丒傾僙儞僽儖丒儕儞僋側偳傑偲傔偰堦婥偵傗偭偰偔傟傞曋棙側婡擻偱偡丅偦偙偱僄儔乕偑偁傞偲僄儔乕偑弌偰偒傑偡偑丄偙偺掱搙側傜懡暘僄儔乕偼弌偰偙側偄傫偠傖側偄偐側偀丠儊僯儏乕偺傪幚峴偟傑偡丅Ctrl+9僉乕偱傕僀働傑偡丅
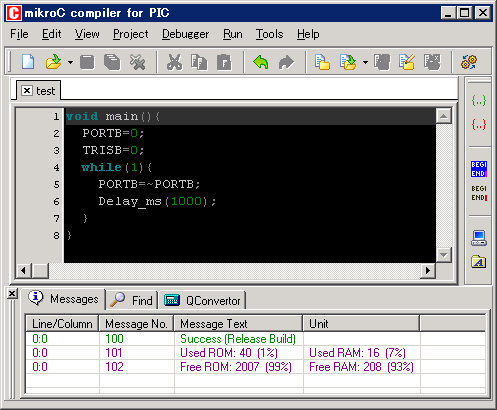
丂僄儔乕側偔僐儞僷僀儖偱偒偨傜丄僂僀儞僪僂壓偺儊僢僙乕僕偵乽Success乿偲弌偰偔傞偼偢偱偡丅偙偺彫偝側僾儘僌儔儉偼丄PIC16F628A偺傢偢偐1%偺僾儘僌儔儉椞堟偱姰惉偟偰偟傑偄傑偟偨丅偨偭偨偙傟偩偗偱丄LED偑僺僐僺僐偟偰偟傑偆傫偱偡偹乣丅偡偛偄偱偡偹乣丅
丂僐儞僷僀儔偑偳偺傛偆偵摥偄偨偐丄偣偭偐偔偱偡偺偱丄偦偺惉壥傪尒偰傒傑偟傚偆丅儊僯儏乕偺傪幚峴偡傞偲丄俠尵岅傪僐儞僷僀儖偟偨寢壥偺傾僙儞僽儔僜乕僗傪尒傞偙偲偑偱偒傑偡丅";"偱巒傑偭偰偄傞峴偼僐儊儞僩丄嵍抂偺4寘偺16恑悢偑傾僪儗僗丄偦偺師偺4寘偑僨乕僞丄偦偟偰塃抂偺暥帤偑傾僙儞僽儔僜乕僗偱偡丅僐儞僷僀儔偼俠尵岅偺僐僩僶傪偙偺杸鎑晄巚媍側傾僙儞僽儔僜乕僗偲偄偆僐僩僶偵東栿偟丄偦偟偰偝傜偵傾僪儗僗偲僨乕僞偺悢帤偵曄姺偟偰偔傟偨偭偰傢偗偱偡偹丅偍旀傟條偱偟偨丅
丂偱偼丄偙偺僾儘僌儔儉偑摦嶌偡傞夞楬恾傪昤偄偰傒傑偟傚偆丅杮摉偼夞楬恾偑愭偱偟傚偆偑丄偙偺掱搙側傜傑偀偄偄偱偟傚偆丅
丂LED偺揰摂丒徚摂(埲屻LED僺僐僺僐)傪孞傝曉偡僥僗僩夞楬恾傪昤偄偰傒傑偟偨丅俀庬椶偁傝傑偡偑丄偳偪傜傕摨偠偱偡丅
丂抦偭偰傞恖偼抦偭偰偄傞偺偱偡偑丄夞楬恾偦偺俀偺昤偒曽偩偲丄椺偊偽GND摨巑傪偮側偖偲偄偆偙偲傪抦傜側偄応崌傕偁傞傜偟偄偺偱偡丅夞楬恾偦偺侾偺昤偒曽偩偲丄揹尮偐傜弌偨5V偑婣偭偰偔傞偺偑傢偐傞偲巚偄傑偡丅偟偐偟偳偙偐傜偱傕婣偭偰偔傞傛偆偵偡傞偲丄夞楬恾偑暋嶨偵側傞偵偮傟偰慄偑偨乕偔偝傫偵側偭偰偟傑偆偺偱丄偦傟傪GND婰崋偱徣棯偟偰昤偒傑偡丅偙偺偔傜偄偺僇儞僞儞側夞楬偩偲栤戣側偄偺偱偡偗偳偹丅
丂偝偰夞楬恾偵偮偄偰尒偰偄偒傑偟傚偆丅揹尮5V偼偳偙偐傜偐庢偭偰偒偰偔偩偝偄丅椺偊偽偙傫側曽朄偑偁傝傑偡丅
丂AC傾僟僾僞偼埨壙偱偪偄偝側傕偺偑廐寧偐傜斕攧偝傟偰偄傑偡丅傂偲偮帩偭偰偍偔偲曋棙偱偟傚偆偹丅傑偨丄PIC16F628A偺摦嶌揹埑偼3.0V乣5.5V偱偡偐傜揹抮偱傕OK偱偡丅2屄捈楍偱偼偪傚偭偲尩偟偄偱偟傚偆偐傜丄3屄捈楍偑偄偄偱偟傚偆丅傑偨丄100墌僔儑僢僾偱働乕僞僀偺USB廩揹働乕僽儖傪攦偭偰偒偰丄掞峈傪奜偣偽僷僜僐儞偺USB億乕僩偐傜5V傪庢傝弌偡偙偲傕偱偒傑偡丅傑偨偼丄9V偺傗12V偺揹抮偐傜5V偺儗僊儏儗乕僞側偳傪巊偆曽朄傕偁傝傑偡丅埲屻偺愢柧偱偼丄5V偑揹尮揹埑偲偟偰巊傢傟偰偄傞偙偲偵偟傑偡丅
丂C1偲C2偼僶僀僷僗僐儞僨儞僒乮僷僗僐儞乯偲偄偭偰丄揹尮僲僀僘傪寉尭偡傞偨傔偺傕偺偱偡丅堦墳擮偺偨傔偵梕検偺堘偆2屄傪偮偗偰偍偒傑偟偨偑傗傝偡偓偐傕偟傟傑偣傫丅
丂IC1偼PIC儅僀僐儞偱偡丅幚嵺偵偼IC僜働僢僩傪巊偄傑偡丅4斣僺儞偼MCLR抂巕偑儕僙僢僩抂巕偵側傝傑偡丅俴儗儀儖乮GND偲摨揹埵乯偱儕僙僢僩丄俫儗儀儖乮揹尮揹埑偲摨揹埵乯偱儕僙僢僩夝彍偲偄偆偙偲偵側傝傑偡偺偱丄梊傔揹尮揹埑傪偮側偄偱偍偒傑偡丅僼僣僂偼掞峈傪嫴傒傑偡偑丄偲傝偁偊偢丒丒丒丅
丂IC1偺14斣抂巕偑PIC偺揹尮丄5斣抂巕偑GND抂巕偱偡丅傑偨丄10斣僺儞RB4/PGM偼掅揹埑彂偒崬傒儌乕僪(LVP_ON)偑桳岠偵側偭偰偄傞偲丄俫儗儀儖偵偟偨偲偒偵彂偒崬傒儌乕僪偵側偭偰偟傑偄傑偡偺偱丄GND偵愙懕偟偰捠忢摦嶌傪偝偣傑偡丅
丂娞怱偺LED偱偡偑丄RB3偵偮側偓傑偟偨丅億乕僩B偺3斣億乕僩偵側傝傑偡丅偙偙偵偮側偄偩偺偼儚働偑偁傞偺偱偡偑丄偦傟偼偍偄偍偄弌偰偒傑偡丅揹尮揹埑偲LED D1偺Vf偵傛偭偰掞峈R1偺掞峈抣偼曄峏偡傞昁梫偑偁傝傑偡丅廐寧偺LED掞峈寁嶼婡傪巊傢偣偰傕傜偄傑偟傚偆丅
丂偝偰丄夞楬偵廬偭偰婎斅偵晹昳傪忔偣偰偄偒傑偟傚偆丅偙偆偄偆僥僗僩偵偼僽儗僢僪儃乕僪偑偄偄偐傕偟傟傑偣傫丅崱夞偼儐僯僶乕僒儖婎斅偵慻傫偱傒傑偟偨丅
丂偱丄IC僜働僢僩偵PIC16F628A傪忔偣傞偺偱偡偑丄偦偆偄偊偽傑偩僾儘僌儔儉偑擖偭偰偄傑偣傫偱偟偨偹丅傑偢偼僾儘僌儔儉偺僟僂儞儘乕僪傪偟側偗傟偽偨偩偺僎僕僎僕偱偡丅
PIC PIC偺堦擭惗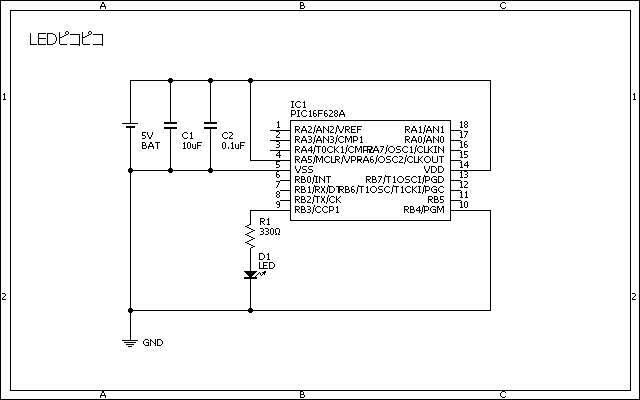{kind=link}
{kind=link}